













環衛、物流、乘用車組局 Robo-City,這家創企要做城市道路自動駕駛平臺型技術
本文轉自雷鋒網,如需轉載請至雷鋒網官網申請授權。
經過數年的探索,如今自動駕駛行業的共識是:Robo-Taxi的商業化落地仍需很長時間。因此可以發現,今年的明顯趨勢是,一些此前專注于Robo-Taxi技術的全棧方案商開始將業務延伸到干線物流、城市配送和市政環衛等商用車和專用車場景。
另一方面,隨著國家政策法規的開放和自動駕駛技術的發展,專注于商用車垂直賽道的部分自動駕駛企業則在自身深耕的場景持續發力,這一類企業明確表示短期不涉足Robo-Taxi。
但是,行業中就有玩家同時踩在了落地和技術兩條路線上。比如酷哇機器人不僅就一腳深度踩進了自動駕駛商業可落地的細分行業,主攻無人環衛和城市配送,另一腳也在邁入短期難以盈利的乘用車領域。
雙線作戰,酷哇背后的邏輯究竟是怎么樣的?
作為中組部引入的海外人才專家,酷哇創始人何弢和新智駕分享了行業經驗。他認為,自動駕駛技術想要加速落地,相比于商業模式創新,本質還是更需要技術突破。
“在城市場景中,智慧環衛、城市配送、Robo-Taxi的自動駕駛技術是相通的,酷哇想要做的,是打造一個能夠同時支撐市政環衛、城市配送及Robo-Taxi測試型營運的平臺型基建。”
智慧環衛沒那么容易
受技術應用難易程度和法律法規限制性影響,先封閉后開放、先載貨后載人,這是普遍被認可的自動駕駛技術商業化落地的路徑,因此干線物流、末端配送、固定線路的環衛領域、礦區、港口等領域集中了大批智能駕駛企業。
酷哇在2017年就相繼進入了市政環衛和城市配送領域,但酷哇認為,這并不意味著,在市政環衛、城市配送場景應用自動駕駛技術就是更簡單和省力的。
何弢告訴新智駕,外界對環衛場景常常存在誤解,認為環衛車主要在凌晨工作,行車速度低且路線固定,所以相比于Robo-Taxi,環衛場景所需的自動駕駛技術難度低,感知方案可更精簡和低成本化,也可使用更低算力的計算平臺。
但事實上,自動駕駛技術在不同環境下的要求與車輛自身的行駛速度關系并不大,而是更多取決于環境中是否存在相對高速移動的物體以及環境的動態復雜度。比如由于高空環境相對動態復雜性較低,飛機就能更早地實現在高速飛行下的自動駕駛。
從環境動態復雜度看,智慧環衛和城市配送面對著和Robo-Taxi類似的境況,所需的自動駕駛技術也是接近Robo-Taxi水平。
而且近年來,隨著創建文明衛生城市活動的推行,各城市普遍增加了清掃保潔的作業頻次和范圍,如今的清掃環衛車基本是常態化巡邏,作業時間大多從早上5點到晚上9點,物流配送車輛也是要時時穿梭在大街小巷中。
而雖然智慧環衛車輛自身行駛速度一般不超過每小時30公里,但由于周圍有著高速移動的車輛物體,為了確保行車安全,因此同樣需要感知、識別和預測出現在車輛、周邊形形色色的行人、高速移動障礙物,什么類型的障礙物需要繞開、什么路況需要停駐等待通過、什么是垃圾需要收集,自動駕駛環衛車輛都需準確識別。
再加上大部分清掃車是貼邊清掃,要求車輛距離路沿不超過5cm,所以車輛對自動駕駛系統的定位、避障能力要求也更高(乘用車是10cm左右)。
因此即使環衛車輛在作業過程中行駛速度相對較低,酷哇也需要在自動駕駛環衛車輛中配備高達1000Tops算力的準車規級異構自動駕駛域控制器和高精度多傳感器融合的感知方案(高線束激光雷達+高分辨率相機),另外也會提供厘米級的高精地圖,做到全局定位精度在5cm。
不僅如此,智慧環衛并不是單車作戰,作業期間還要對涉及到的人、車、物、事進行全過程實時管理,比如對各類環衛作業車輛進行調度派車、收集出收車時間、作業路線、運行時長、行駛距離及車輛狀況等作業日志,這意味著一套完整的行業自動駕駛解決方案必須配備一個可高效使用的云腦管理系統。
因此與單純提供針對市政環衛和城市配送場景無人駕駛解決方案的企業不同,為了深入理解場景,酷哇還有無人駕駛環衛車隊,并提供環衛運營服務,可以做到對環衛車隊的全局規劃、自適應導航、安全策略部署等。
根據介紹,目前酷哇在全國20多個重要地市均有常態化基于自動駕駛和智能網聯的智慧環衛項目營運,自動駕駛環衛車輛過千臺,營運面積超過千萬平方米,還有3TB單臺智能環衛車駕駛日志,算是智慧環衛領域的第一梯隊企業。
從智能環衛車輛產品線看,酷哇有18噸以上的浩克系列車輛,主要負責城市主干道的清潔、灑水和垃圾收轉運任務;有總噸位在3噸左右的麒麟系列車輛,主要服務于一般的城市道路和輔道;還有1噸及以下的獨角獸系列車輛,主要負責人行道。
酷哇為什么要做Robo-Taxi?
至于商業模式,酷哇現采用MaaS+SaaS的模式,提供基于無人化作業車隊的租售及數據服務:向客戶免費開放平臺,從車輛及數據的月租上收費。具體車輛的租賃定價模式根據不同行業情況有所不同,如市政環衛項目按服務面積收費;物流按貨物公斤數收費。
酷哇的商業化進展飛快,目前商業體量實現了每年3倍以上增速,自動駕駛市政類項目年化銷售接近10億,是自動駕駛企業中十分少見形成規模化銷售的企業。
但與死磕環衛場景的自動駕駛企業不同,酷哇認為智慧環衛不是商業化的終點,而是破局點。
根據規劃,酷哇還會將自動駕駛技術落地應用在出行領域。
一方面,雖然自動駕駛在環衛領域應用,國內有千億規模的市場容量,但相比于Robo-Taxi領域,很快就能達到大規模商業化拐點。不僅如此,縱使市場天花板低,卻也有眾多傳統環衛公司和新科技公司一齊競爭,賽況激烈。
另一方面,酷哇在將自動駕駛技術應用于市政環衛細分領域中擁有先發優勢,隨著數據和算法的不斷積累和優化,也為其進入更加開放的道路場景奠定了基石。
今年9月,酷哇宣布完成了C輪2.5億美元的融資,而此輪融資的用途之一,就是要進一步擴大酷哇Robo-Taxi測試車隊的規模。
不論是酷哇在這兩個場景的業務或相應的融資,都能提供一定的現金流,從而支撐酷哇對自動駕駛技術的持續研發。
10月,酷哇還宣布和奇瑞達成戰略合作,計劃將與奇瑞聯手全面打造公開場景的L4級別規模商業化應用,并將聯合開發新一代智能網聯L4-L5級別自動駕駛車輛。
其實在2019年,酷哇就已經與奇瑞在蕪湖和上海建立了公開道路的自動駕駛測試項目,該項目以奇瑞新能源車型為基礎,并搭載了酷哇的自動駕駛系統。
事實上,酷哇早在2016年10月就已開始落地Robo-Taxi測試,目前已在安徽蕪湖、上海嘉定及徐匯、湖南長沙等地展開公開路測,累計安全測試公里數超過500萬公里。
不過酷哇目前并不是將Robo-Taxi作為商業盈利的載體,而是將之作為提高酷哇自動駕駛技術成熟度的實驗平臺和手段,以加速自動駕駛技術在市政環衛和城市配送場景的落地。
如前所述,城市場景下,市政環衛、城市配送、Robo-Taxi都面臨著類似的復雜環境,但由于Robo-Taxi的行駛半徑更大,對算法和感知的容錯度更低,因此也需要解決更多的長尾問題。
為了實現城市動態場景中自動駕駛技術的突破和完善,企業需要獲得大量城市場景中的自動駕駛數據,利用數據進行自動駕駛算法、軟件和平臺的迭代升級,再通過規模化的車隊驗證算法。

數據獲取、技術迭代、算法驗證,三個環節需周而復始且缺一不可。
何弢表示,Robo-Taxi乘用車能最直接、最高效地反映出其自動駕駛軟件、算法的各種長尾問題,是檢驗其自動駕駛技術在城市場景中是否可成熟應用的代表性平臺。
在他看來,不先驗證自動駕駛技術的成熟度,而首先去考慮技術的商業化落地和應用,是本末倒置,也是相當危險的方式,所以從成立之初,酷哇的研發平臺就是基于Robo-Taxi的。
終局:平臺型技術?
為了不斷提高其技術的復用率,酷哇也就更注重對自動駕駛解決方案底層能力的構建,希望打造出能夠同時支撐環衛、城市配送及Robo-Taxi測試型營運的平臺型技術。
何弢認為,要想推動自動駕駛技術更廣范的落地,既需要具備各自垂直場景的業務型技術,也需要具備各場景下都能普遍適用的通用型技術,即城市場景下的自動駕駛軟硬件解決方案。
目前,在硬件方面,酷哇聯合中聯環境、盈峰環境、北汽、奇瑞等行業頭部企業,已開發出3噸-18噸級別的新能源線控底盤和車規級自動駕駛控制器等;軟件方面,酷哇則自研了AutoPilot無人駕駛系統、城市大管家云腦系統、厘米級高精定位技術等。
而此類平臺型技術的核心,在于企業對自動駕駛數據的獲取和加工,這決定著自動駕駛算法的可用度,也影響著自動駕駛車輛在城市場景中的落地。

每一臺自動駕駛車輛都是數據的入口,這是酷哇的自動駕駛技術應用從環衛車、城市配送車擴大到乘用車的關鍵原因,也是目前各企業強調和不斷積累車輛所測試里程數的原因。
但如今自動駕駛技術日新月異,比如感知方案中,無論是激光雷達、高清攝像頭系統,還是多傳感器融合系統,每年都在進行著革命性的迭代升級。
每次出現了新的感知硬件方案的迭代升級,數據源端也隨之發生了變化,這意味著企業此前所收集到的相關自動駕駛數據的清零和失效。
“我們推動對平臺型技術的研發,本質上是想打造超級數據工廠,希望每當感知方案發生重要革命性創新時,酷哇仍有很強的數據獲取和加工能力。”何弢對新智駕表示,企業對數據的收集、清洗、標注越高效,對算法性能的迭代升級越高效,在行業中的競爭力就越強。
在這個層面,各自動駕駛企業還在技術儲備階段,真正的競爭還沒有開始。
因此,相比于把資源投入到規模化車隊的復制上,酷哇表示會更注重對數據超級工廠的建設。
酷哇在智慧環衛領域快速發展的原因,在于在自動駕駛行業中,它找到了自己的確定性。
如今酷哇又聯合奇瑞,去打造L4-L5級別自動駕駛車輛,這實際上非常考驗酷哇對行業需求、技術產品趨勢和自身能力的準確預判。
何弢作為酷哇的創始人兼董事長,對自動駕駛和機器人領域研究十余年,但同時也對自動駕駛行業的商業模式和自身企業盈利模式有著自己思考。
不同于業內從道路封閉程度對自動駕駛落地場景的分類,酷哇根據對自動駕駛技術的要求和依賴程度,將場景之分成三類:
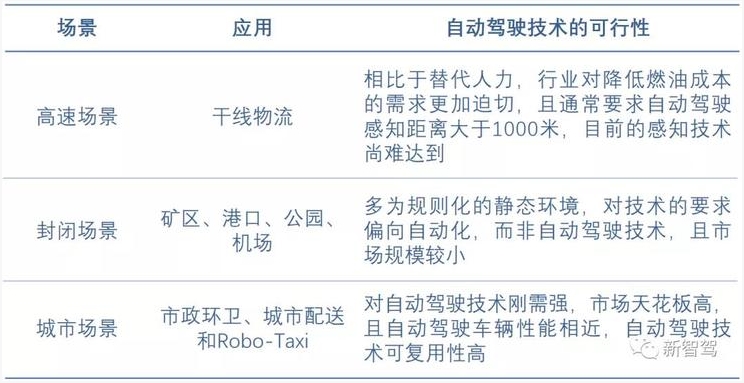
因此,酷哇就選擇了城市場景下的環衛、物流、Robo-Taxi場景,試圖通過打造城市道路自動駕駛平臺型技術,組局Robo-City。
酷哇認為,這意味著自動駕駛企業真正角逐的開始。
總結
回顧成立6年來酷哇的走向,其技術線是始終專注于L4-L5級的自動駕駛技術;產品線則先從智慧環衛車輛、城市配送車輛,逐漸過渡到如今的乘用車;接下來則將大力打造平臺型技術,試圖以技術本身的突破和成熟,來反哺推動自動駕駛技術的進一步商業化落地。
既有對垂直場景的深度理解,又有對自動駕駛技術的突破,能將二者深入結合,酷哇將之視為自身的獨特優勢。
當然,這也意味著酷哇需要保證持續的輸血能力,以持續運轉,同時也對其支撐團隊有著極高的要求。
畢竟又懂高級別自動駕駛技術的研發,又懂垂直場景需求,還要能跳出垂直場景,理解智能網聯車輛和整個自動駕駛行業,這樣的人才去哪兒都是香餑餑。





















