首個在ImageNet上精度超過80%的二值神經網絡BNext問世,-1與+1的五年辛路歷程
兩年前,當 MeliusNet 問世時,機器之心曾發表過一篇技術文章《??第一次勝過 MobileNet 的二值神經網絡,-1 與 + 1 的三年艱苦跋涉???》,回顧了 BNN 的發展歷程。彼時,依靠早期 BNN 工作 XNOR-Net 起家的 XNOR.AI 被蘋果公司收購,大家曾暢想過這種低功耗、高效能的二值神經網絡技術會不會即將開啟廣闊的應用前景。
然而,過去的兩年時間,我們很難從對技術嚴格保密的蘋果公司獲得關于 BNN 技術應用的更多信息,而不論是學界和業界也未出現其他特別亮眼的應用案例。另一方面,隨著終端設備數量的暴漲,邊緣 AI 應用和市場正在迅速增長: 預計到 2030 年將產生 500 到 1250 億臺邊緣設備,邊緣計算市場將暴漲到 600 億美元規模。這其中有幾個目前熱門的應用領域:AIoT、元宇宙和機器人終端設備。相關業界正在加速發力技術落地,與此同時 AI 能力已經嵌入到以上領域的諸多核心技術環節中,如 AI 技術在三維重建、視頻壓縮以及機器人實時感知場景中的廣泛應用。在這樣的背景下,業界對基于邊緣的高能效、低功耗 AI 技術、軟件工具以及硬件加速的需求變的日益迫切。
目前,制約 BNN 應用的瓶頸主要有兩方面:首先,無法有效縮小和傳統 32-bit 深度學習模型的精度差距;第二則是缺乏在不同硬件上的高性能算法實現。機器學習論文上的加速比通常無法體現在你正在使用的 GPU 或 CPU 上。第二個原因的產生可能正是來自于第一個原因,BNN 無法達到令人滿意的精度,因此無法吸引來自系統和硬件加速、優化領域的從業者的廣泛關注。而機器學習算法社區通常無法自己開發高性能的硬件代碼。因此,想要同時獲得高精度和強加速效果,BNN 應用或加速器無疑需要來自這兩個不同領域的開發者進行協作。
BNN 為什么對于計算和內存高效
舉個例子,Meta 推薦系統模型 DLRM 使用 32-bit 浮點數來儲存權重和激活參數,它的模型大小約為 2.2GB。而一個少量精度下降 (<4%) 的二值版本模型的大小僅為 67.5MB,由此可見二值神經網絡可以節省 32 倍的模型大小。這對于儲存受限的邊緣設備來說具備了非常強的優勢。此外,BNN 也非常適合應用在分布式 AI 場景中,例如聯邦學習常常對模型權重進行傳輸和聚合操作,因此模型大小和帶寬受限往往成為整個系統的瓶頸。常用的手段是通過增加模型本地優化迭代次數來換取權重傳輸頻率的降低,用這種折中的方法來提升整體效率,如著名的谷歌 FedAvg 算法。但增大本地計算量的策略對端側用戶并不友好,這里,如果采用 BNN 就可以很輕易的降低幾十倍的數據傳輸量。
BNN 的第二個顯著的優勢是計算方式極度高效。它只用 1bit 也就是兩種 state 來表示變量。這意味著所有運算只靠位運算就能完成,借助與門、異或門等運算,可以替代傳統乘加運算。位運算是電路中的基礎單元,熟悉電路設計的同學應該明白,有效減小乘加計算單元的面積以及減少片外訪存是降低功耗的最有效手段,而 BNN 從內存和計算兩個方面都具備得天獨厚的優勢,WRPN[1]展示了在定制化 FPGA 和 ASIC 上,BNN 對比全精度可獲得 1000 倍的功耗節省。更近期的工作 BoolNet [2]展示了一種 BNN 結構設計可以幾乎不使用浮點運算并保持純 binary 的信息流,它在 ASIC 仿真中獲得極佳的功耗、精度權衡。
第一個精度上 80% 的 BNN 是什么樣子的?
來自德國 Hasso Plattner 計算機系統工程研究院的 Nianhui Guo 和 Haojin Yang 等研究者提出了 BNext 模型,成為第一個在 ImageNet 數據集上 top1 分類準確率突破 80% 的 BNN:

圖 1 基于 ImageNet 的 SOTA BNN 性能對比

論文地址:https://arxiv.org/pdf/2211.12933.pdf
作者首先基于 Loss Landscape 可視化的形式深入對比了當前主流 BNN 模型同 32-bit 模型在優化友好度方面的巨大差異 (圖 2),提出 BNN 的粗糙 Loss Landscape 是阻礙當前研究社區進一步探索 BNN 性能邊界的的主要原因之一。
基于這一假設,作者嘗試利用新穎的結構設計對 BNN 模型優化友好度進行提升,通過構造具備更平滑 Loss Landscape 的二值神經網絡架構以降低對高精度 BNN 模型的優化難度。具體而言,作者強調模型二值化大幅度限制了可用于前向傳播的特征模式,促使二值卷積僅能在有限的特征空間進行信息提取與處理,而這種受限前饋傳播模式帶來的優化困難可以通過兩個層面的結構設計得到有效緩解:(1) 構造靈活的鄰接卷積特征校準模塊以提高模型對二值表征的適應性;(2) 探索高效的旁路結構以緩解前饋傳播中由于特征二值化帶來的信息瓶頸問題。

圖 2 針對流行 BNN 架構的 Loss Landscape 可視化對比(2D 等高線視角)
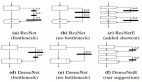
基于上述分析,作者提出了 BNext,首個在 ImageNe 圖像分類任務達到 > 80% 準確率的二值神經網絡架構,具體的網絡架構設計如圖 4 所示。作者首先設計了基于 Info-Recoupling (Info-RCP) 模塊的基礎二值處理單元。針對鄰接卷積間的信息瓶頸問題,通過引入額外的 Batch Normalization 層與 PReLU 層完成對二值卷積輸出分布的初步校準設計。接著作者構造了基于逆向殘差結構與 Squeeze-And-Expand 分支結構的二次動態分布校準設計。如圖 3 所示,相比傳統的 Real2Binary 校準結構,額外的逆向殘差結構充分考慮了二值單元輸入與輸出間的特征差距,避免了完全基于輸入信息的次優分布校準。這種雙階段的動態分布校準可以有效降低后續鄰接二值卷積層的特征提取難度。

圖 3 卷積模塊設計對比圖
其次,作者提出結合 Element-wise Attention (ELM-Attention) 的增強二值 Basic Block 模塊。作者通過堆疊多個 Info-RCP 模塊完成 Basic Block 的基礎搭建,并對每個 Info-RCP 模塊引入額外的 Batch Normalization 和連續的殘差連接以進一步緩解不同 Info-RCP 模塊間的信息瓶頸問題。基于旁路結構對二值模型優化影響的分析, 作者提出使用 Element-wise 矩陣乘法分支對每個 Basic Block 的首個 3x3 Info-RCP 模塊輸出進行分布校準。額外的空域注意力加權機制可以幫助 Basic Block 以更靈活的機制進行前向信息融合與分發,改善模型 Loss Landscape 平滑度。如圖 2.e 和圖 2.f 所示,所提出的模塊設計可以顯著改善模型 Loss Landscape 平滑度。

圖 4 BNext 架構設計。"Processor 代表 Info-RCP 模塊,"BN "代表 Batch Normalization 層,"C "表示模型基本寬度,"N "和"M " 表示模型不同階段的深度比例參數。

Table 1 BNext 系列。“Q”表示輸入層、SEbranch以及輸出層量化設置。
作者將以上結構設計同流行的MoboleNetv1基準模型結合,并通過改變模型深度與寬度的比例系數構建了四種不同復雜度的 BNext 模型系列 (Table 1):BNex-Tiny,BNext-Small,BNext-Middle,BNext-Large。
由于相對粗糙的 Loss Landscape,當前二值模型優化普遍依賴于 knowledge distillation 等方法提供的更精細監督信息,以此擺脫廣泛存在的次優收斂。BNext作者首次考慮了優化過程中teache模型與二值student模型預測分布巨大差距可能帶來的影響,,指出單純基于模型精度進行的 teacher 選擇會帶來反直覺的 student 過擬合結果。為解決這一問題,作者提出了 knowledge-complexity (KC) 作為新的 teacher-selection 度量標準,同時考慮 teacher 模型的輸出軟標簽有效性與 teacher 模型參數復雜度之間的關聯性。

如圖 5 所示,基于 knowledge complexity,作者對流行全精度模型系列如 ResNet、EfficientNet、ConvNext 進行了復雜度度量與排序,結合 BNext-T 作為 student 模型初步驗證了該度量標準的有效性,并基于排序結果用于后續實驗中的 knowledge distillation 模型選擇。

圖 5 反直覺的過擬合效應和不同教師選擇下的知識復雜性影響
在此基礎上,論文作者進一步考慮了強 teacher 優化過程中由于早期預測分布差距造成的優化問題,提出 Diversified Consecutive KD。如下所示,作者通過強弱 teachers 組合的知識集成方法對優化過程中的目標函數進行調制。在此基礎上,進一步引入 knowledge-boosting 策略,利用多個預定義候選 teachers 在訓練過程中對弱 teacher 進行均勻切換,將組合知識復雜度按照從弱到強的順序進行課程式引導,降低預測分布差異性帶來的優化干擾。

在優化技巧方面,BNext 作者充分考慮了現代高精度模型優化中數據增強可能帶來的增益,并提供了首個針對現有流行數據增強策略在二值模型優化中可能帶來影響的分析結果,實驗結果表明,現有數據增強方法并不完全適用于二值模型優化,這為后續研究中特定于二值模型優化的數據增強策略設計提供了思路。
基于所提出架構設計與優化方法,作者在大規模圖像分類任務 ImageNet-1k 進行方法驗證。實驗結果如圖 6 所示。

圖 6 基于 ImageNet-1k 的 SOTA BNN 方法比較。
相比于現有方法,BNext-L 在 ImageNet-1k 上首次將二值模型的性能邊界推動至 80.57%,對大多數現有方法實現了 10%+ 的精度超越。相比于來自 Google 的 PokeBNN, BNext-M 在相近參數量前提下要高出 0.7%,作者同時強調,PokeBNN 的優化依賴于更高的計算資源,如高達 8192 的 Bacth Size 以及 720 個 Epoch 的 TPU 計算優化,而 BNext-L 僅僅以常規 Batch Size 512 迭代了 512 個 Epoch,這反映了 BNext 結構設計與優化方法的有效性。在基于相同基準模型的比較中,BNext-T 與 BNext-18 都有著大幅度的精度提升。在同全精度模型如 RegNetY-4G (80.0%)等的對比中,BNext-L 在展現相匹配的視覺表征學習能力同時,僅僅使用了有限的參數空間與計算復雜度,這為在邊緣端部署基于二值模型特征提取器的下游視覺任務模型提供了豐富想象空間。
What next?
BNext 作者在論文中提到的,他們和合作者們正積極在 GPU 硬件上實現并驗證這個高精度 BNN 架構的運行效率,未來計劃擴展到其他更廣泛的硬件平臺上。然而在編者看來,讓社區對 BNN 重拾信心,被更多系統和硬件領域的極客關注到,也許這個工作更重要的意義在于重塑了 BNN 應用潛力的想象空間。從長遠來看,隨著越來越多的應用從以云為中心的計算范式向去中心化的邊緣計算遷移,未來海量的邊緣設備需要更加高效的 AI 技術、軟件框架和硬件計算平臺。而目前最主流的 AI 模型和計算架構都不是為邊緣場景設計、優化的。因此,在找到邊緣 AI 的答案之前,相信 BNN 始終都會是一個充滿技術挑戰又蘊涵巨大潛力的重要選項。